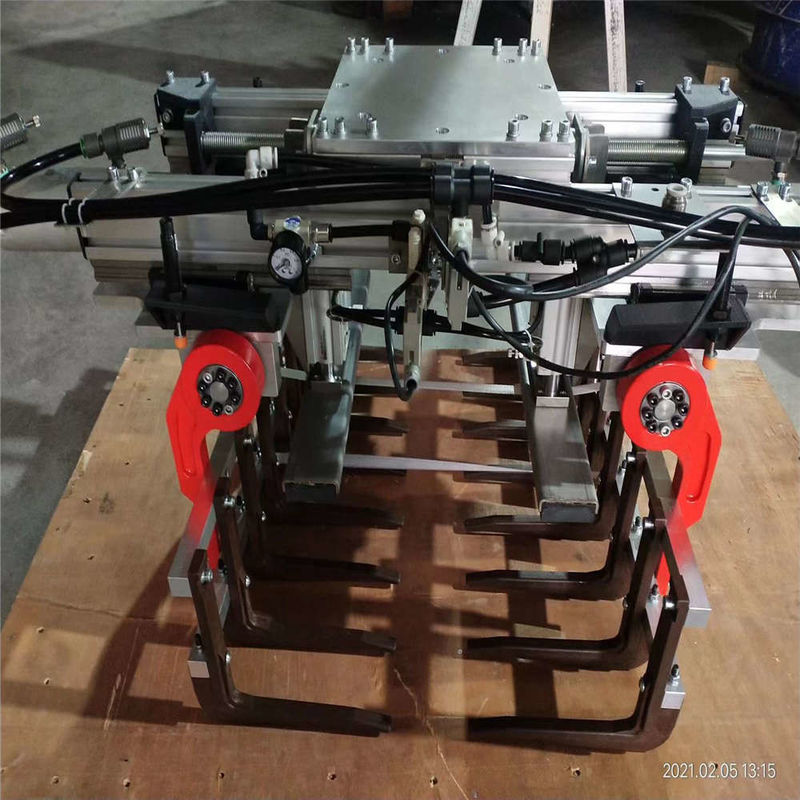
Gripper peralatan periferal lainnya untuk aplikasi paletizing
Referensi data kebutuhan input
| 1 Tabel 1 |
| Jenis genggaman |
Tas |
| Ambil berat dan ukuran |
50KG:L1050mm*W550mm*H250mm |
| Kecepatan palletisasi (tas/jam) |
450 kantong/jam |
| Format palet |
1 Penangkapan dan 1 pelepasan sekali |
| Bentuk pegangan |
Genggam Gigi |
| bahan utama |
Paduan aluminium dan baja karbon |
| Komponen pneumatik utama |
SMC |
| Bahan gigi |
Bar bulat |
| Jarak gigi pegangan |
80 mm |
| Ukuran pegangan (nilai referensi) |
L1057mm*W908mm*H470mm |
| Berat pegangan (KG) |
40 kg |
| Merek robot |
Effort |
| Beban robot (KG) |
ER130-4-2800 |
| |
|
| 2 Tabel 2 |
| Jenis genggaman |
Kotak karton |
| Ambil berat dan ukuran |
15KG:L300mm*W200mm*H200mm |
| Kecepatan palletisasi (tas/jam) |
450 kotak/jam |
| Format palet |
1 Penangkapan dan 1 pelepasan sekali |
| Bentuk pegangan |
Penggenggam piring |
| bahan utama |
Paduan aluminium dan baja karbon |
| Komponen pneumatik utama |
SMC |
| Ukuran pegangan (nilai referensi) |
L800mm*W180mm*H400mm |
| Berat pegangan (KG) |
40 Kg |
| Merek robot |
Effort |
| Beban robot (KG) |
ER180-4-3200 |
| |
|
Catatan: Disarankan untuk membuat komposit pegangan dan menambahkan satu set vakum.
Bahkan jika ketebalan kayu lapis yang menonjol di antara kotak-kotak dan
kotak pada palet disediakan, ada banyak lapisan palet, yang tidak dapat dijamin antara setiap lapisan kotak dan
kotak Celah adalah sama, sehingga hanya dibuat sebagai pegangan dalam bentuk tabung, yang mungkin tidak dapat meraih setiap kotak pada
Hal ini juga perlu dipertimbangkan bahwa mesin tidak memberikan perlindungan keselamatan selama berjalan dan dapat
Jika dibuat menjadi jenis senyawa, hanya perlu untuk memperpanjang cangkir hisap dan mengisap kotak.
kotak disedot ke ketinggian tertentu, cangkir hisap ditarik kembali, dan kemudian splin diikat ke karton.
Pertama-tama buka splin, cup hisap membentang, dan menempatkan kotak pada nampan.
harga akan $ 7000 FOB Shanghai. |
Instruksi pengguna:
Manual Instruksi
1. personil instalasi dan debugging yang relevan harus diminta untuk membongkar dan membongkar
2Langkah-langkah instalasi adalah sebagai berikut:
1) Menginstal pegangan pada mesin sesuai dengan arah pemrograman mesin
2) Kemudian memasang pegangan pada mesin dan mengikatnya dengan kuat
3) Sambungkan trakea dan sirkuit sesuai kebutuhan
4) Setelah pemasangan selesai, pegangan harus diaktifkan dengan kotak pengajaran setelah menyalakan.Jika tidak, konsekuensinya akan Anda tanggung sendiri..) Pegangan tidak boleh dibuka dan ditutup tanpa alasan.
5) Setelah pengajaran kotak pengajaran selesai, uji linkage dilakukan, dan akhirnya memasuki operasi normal.
6) Jika Anda ingin menyesuaikan lebar pegangan, Anda harus pertama melonggarkan sekrup atau kacang yang relevan, dan kemudian memutar sekrup untuk menyesuaikan lebar pegangan
7) Bentuk bahan pakan dalam pengumpan harus tetap lurus. Jika tidak, pegangan akan memukul benda yang akan ditangkap, dan inang dapat rusak dalam kasus yang parah.
Prosedur pengadaan
码??抓手调试 langkah-langkah
Langkah-langkah debugging pegangan palletisasi
1.抓手在安装于机器人臂后,找准在待码机的中心位置,然后找准零点位置 ((不宜过深).Setelah pegangan dipasang pada lengan robot, temukan posisi pusat mesin siaga, dan kemudian temukan posisi nol (tidak terlalu dalam).
2. setelah mencari posisi titik nol, dengan cara manual di titik nol, buka tangkap, periksa apakah tangkap itu menyentuh benda di sekitarnya dalam proses pembukaan. lakukan penyesuaian yang tepat. sampai aman dibuka dan ditutup. Setelah menemukan posisi nol, buka gigi pegangan secara manual di posisi nol,dan periksa apakah gigi pegangan menyentuh benda-benda di sekitarnya selama proses pembukaanLakukan penyesuaian yang tepat sampai aman untuk membuka dan menutup.
3. akan menangkap tangan berhenti di posisi nol, menyesuaikan bagian depan mesin pengirim, membuat paket di pusat mesin pengirim dengan pusat pengambil harus tetap konsisten.Hentikan pegangan pada posisi nol dan menyesuaikan baffle dari conveyor depan sehingga pusat bun pada conveyor harus konsisten dengan pusat pegangan.
4. strictly check the position of the actual packages after they are transported into the waiting machine. garansi dengan hasil yang sama seperti yang tercantum pada paragraf ketiga, mengunci semua sekrup papan. menjaga tidak dapat mudah berubah. periksa secara ketat posisi roti yang sebenarnya setelah mereka diangkut ke mesin tunggu. untuk memastikan hasil yang sama seperti pada poin 3,mengunci semua sekrup bezelTidak bisa diubah dengan mudah.
5.按3,4条调整完后,用校示盒手动校准各位位置 Setelah menyesuaikan sesuai dengan poin 3 dan 4, gunakan kotak kalibrasi untuk secara manual kalibrasi setiap posisi
6. di real menangkap paket sebelum memeriksa semua ukuran paket, sesuai dengan persyaratan kontrak kemudian menggunakan bentuk manual coba menangkap paket, menangkap mengambil paket setelah memeriksa menangkap tangan memiliki atau tidak menangkap paket. berdasarkan situasi yang sebenarnya untuk lebar genggaman melakukan penyesuaian yang tepat. Periksa semua dimensi roti sebelum meraih roti. Setelah memenuhi persyaratan kontrak,Cobalah untuk meraih roti dengan tangan. Setelah mengambil roti, periksa apakah pegangan telah meraih roti. Sesuai menyesuaikan lebar pegangan sesuai dengan situasi yang sebenarnya.
7. menyelesaikan langkah-langkah di atas, dengan 10% kecepatan udara berjalan utuh tumpukan, memeriksa tidak ada kesalahan setelah dengan 20% kecepatan memasuki tangkapan nyata, kemudian secara bertahap meningkatkan kecepatan sampai kecepatan yang sesuai sampai. Setelah menyelesaikan langkah-langkah di atas, kosong pada 10% kecepatan untuk palet lengkap, setelah memeriksa bahwa itu benar,Masuk ke genggaman nyata pada kecepatan 20%, dan kemudian meningkatkan kecepatan secara bertahap sampai mencapai kecepatan yang tepat.
8. terakhir memeriksa pipa udara dan kabel kontrol apakah baik diikat di genggaman tangan. menghindari pipa udara dan kabel kontrol yang rusak dalam operasi. Akhirnya memeriksa apakah trakea dan kabel kontrol yang baik diikat pada pegangan. Menghindari trakea dan kabel kontrol yang dilemparkan selama operasi.
9. memeriksa apakah instalasi anti gas tiba-tiba-putus ventilasi. langkah-langkah di atas selesai sampai di tempat, dapat bekerja normal. periksa apakah anti-gas tiba-tiba-putus ventilasi perangkat yang dipasang. langkah-langkah di atas selesai di tempat dan dapat bekerja normal.
Kasus referensi
Informasi kemasan.

Persyaratan yang disesuaikan sangat disambut

 Pesan Anda harus antara 20-3.000 karakter!
Pesan Anda harus antara 20-3.000 karakter!